Difference between revisions of "Team:TU Delft SamanthasPage/Modeling"
| Line 19: | Line 19: | ||
</style> | </style> | ||
| − | + | <div class="jumbotron"> | |
<div class="panel-group" id="accordion_s1" role="tablist" aria-multiselectable="true"> | <div class="panel-group" id="accordion_s1" role="tablist" aria-multiselectable="true"> | ||
<div class="panel panel-default"> | <div class="panel panel-default"> | ||
| Line 34: | Line 34: | ||
</div> | </div> | ||
</div> | </div> | ||
| − | + | </div> | |
<span class="anchor" id="p&p"></span> | <span class="anchor" id="p&p"></span> | ||
Revision as of 00:42, 18 September 2015




Time for Printing
In the section hardware, we characterized the velocity profile of our 3D printer. In order to make your figure of choice, the motors need to be pressed for a certain amount of time. In order to calculate these times, the MATLAB functions “Time_printer.m” and “Connect_points.m” have been written. These codes generate a text file which indicates how many seconds the motors have to be pressed to make a certain figure with our Biolinker.
Tutorial to printing time!
Let’s say, we want to print TU in the petri-dish with the Biolinker. At first, the number of points of this figure needs to be determined. To print TU you would need 8 points. The number of points can be set by changing the parameter “max_teller” in the file “Time_printer.m” (here: 8 points). When this parameter has been filled in, the file “Time_printer” can be run in MATLAB. After running, the file generates the following figure:
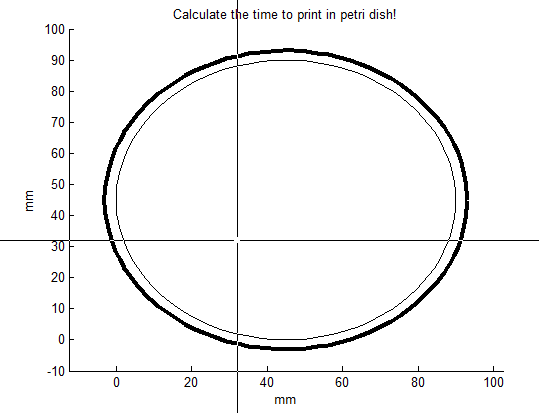
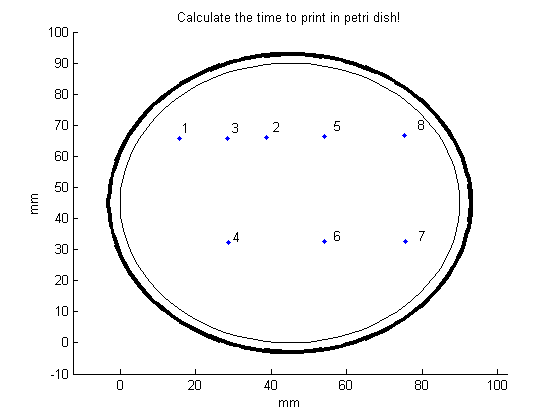
The middle of the cross indicates where the point will be placed after clicking. Click 8 times for making TU appear in the petri dish:
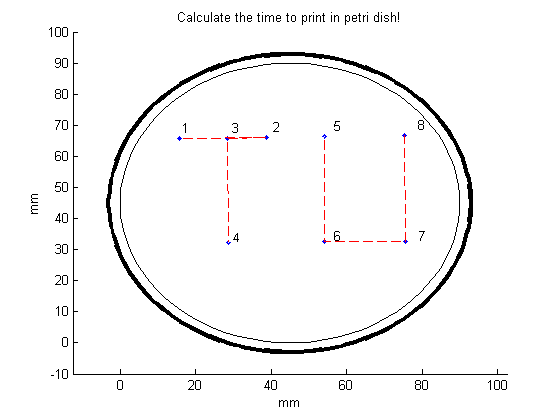
In order to make the desired figure more clear, open the function “Connect_points.m”. In this file, there are two input parameters.
The first input parameter is “line_to_be_removed”. Inside the squared brackets, list the points that should not be connected (here: points 4 and 5).
In the second input parameter, “time_to_press”, indicate with which gear you want to print. For the slow gear select “v_slow”, for the fast gear select “v_fast”. The “v” stands for the velocity of the needle, which has been measured for both gears. For the specifications of the measurements, go to the section “Hardware”.
To print TU in a petri dish, we will select the slow gear. The MATLAB file “Connect_ponts.m” can now be runned. The following figure will appear:
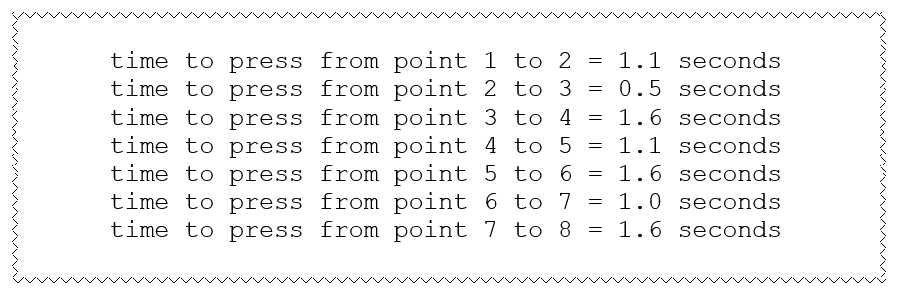
If the printed figure is satisfying enough, the printing times can be requested by clicking on the automatic generated test file “time_to_press”.
Opening the file “time_to_press.m” gives the following result: