Difference between revisions of "Team:Heidelberg/Modeling/rtsms"
| Line 99: | Line 99: | ||
<td style="width:350px;"> | <td style="width:350px;"> | ||
<p> | <p> | ||
| − | $n_A$ depends on function of $ | + | $n_A$ depends on function of $T^*$ and $A$</p> |
<p> | <p> | ||
| − | $n_A=n_{A,0} A^{k} / | + | $n_A=n_{A,0} A^{k} /T^{*l}$</p> |
</td> | </td> | ||
<td style="width:200px;"> | <td style="width:200px;"> | ||
| Line 184: | Line 184: | ||
<td style="width:151px;"> | <td style="width:151px;"> | ||
<p> | <p> | ||
| − | + | Variant</p> | |
</td> | </td> | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
| Line 200: | Line 200: | ||
Basic model</p> | Basic model</p> | ||
<p> | <p> | ||
| − | + | Variants 1 to 4, 4c</p> | |
</td> | </td> | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[ | + | $\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[T^*]-k_{deg,P}[P]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 210: | Line 210: | ||
<td style="width:151px;"> | <td style="width:151px;"> | ||
<p> | <p> | ||
| − | + | Variant 4a</p> | |
</td> | </td> | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
| Line 224: | Line 224: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[ | + | $\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[T^*]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 240: | Line 240: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[T]}{dt}=-k_{on}[T][P]+k_{off}[ | + | $\frac{d[T]}{dt}=-k_{on}[T][P]+k_{off}[T^*]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 250: | Line 250: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $[T]=[T_{tot}]-[ | + | $[T]=[T_{tot}]-[T^*]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 256: | Line 256: | ||
<td rowspan="2" style="width:55px;"> | <td rowspan="2" style="width:55px;"> | ||
<p> | <p> | ||
| − | $ | + | $T^*$</p> |
</td> | </td> | ||
<td style="width:151px;"> | <td style="width:151px;"> | ||
| Line 266: | Line 266: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[ | + | $\frac{d[T^*]}{dt}=k_{on}[T][P]-k_{off}[T^*]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 276: | Line 276: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $[ | + | $[T^*]=\frac{[T_{tot}][P]}{K_{d,P}}$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 292: | Line 292: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[A]}{dt}=-k_{syn}[A][ | + | $\frac{d[A]}{dt}=-k_{syn}[A][T^*]-k_{deg,A}[A]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 302: | Line 302: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[A]}{dt}=-k_{syn}\frac{[A][ | + | $\frac{d[A]}{dt}=-k_{syn}\frac{[A][T^*]}{K_{m,T}+[T^*]}-k_{deg,A}[A]$</p> |
<p> | <p> | ||
</p> | </p> | ||
| Line 314: | Line 314: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[A]}{dt}=-k_{syn}[A][ | + | $\frac{d[A]}{dt}=-k_{syn}[A][^*]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 330: | Line 330: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}[A][ | + | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}[A][T^*]$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 340: | Line 340: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}\frac{[A][ | + | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}\frac{[A][T^*]}{K_{m,T}+[T^*]}$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 350: | Line 350: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]^{k}}{[ | + | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]^{k}}{[T^*]^{l}}}[A][T^*]=\frac{k_{syn}}{n_{A,0}}[A]^{1-k}[T^*]^{1+j}$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
| Line 360: | Line 360: | ||
<td style="width:436px;"> | <td style="width:436px;"> | ||
<p> | <p> | ||
| − | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]}{[ | + | $\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]}{[T*]^{l}}}[A][T^*]=\frac{k_{syn}}{n_{A,0}}[T^*]^{1+j}$</p> |
</td> | </td> | ||
</tr> | </tr> | ||
Revision as of 06:43, 2 October 2015

Studying determinants of polymerase efficiency based on an aptamer sensor
Our subproject on small molecule sensing facilitates quantitatively studying in vitro transcription (IVT) by ATP-spinach and malachite green RNA-aptamers. In particular, we could study the inaccuracy of polymerases reflected by an excess of consumed ATP molecules over the number of ATP molecules in synthesized malachite green aptamers, based on a mathematical model (Figure 1A).
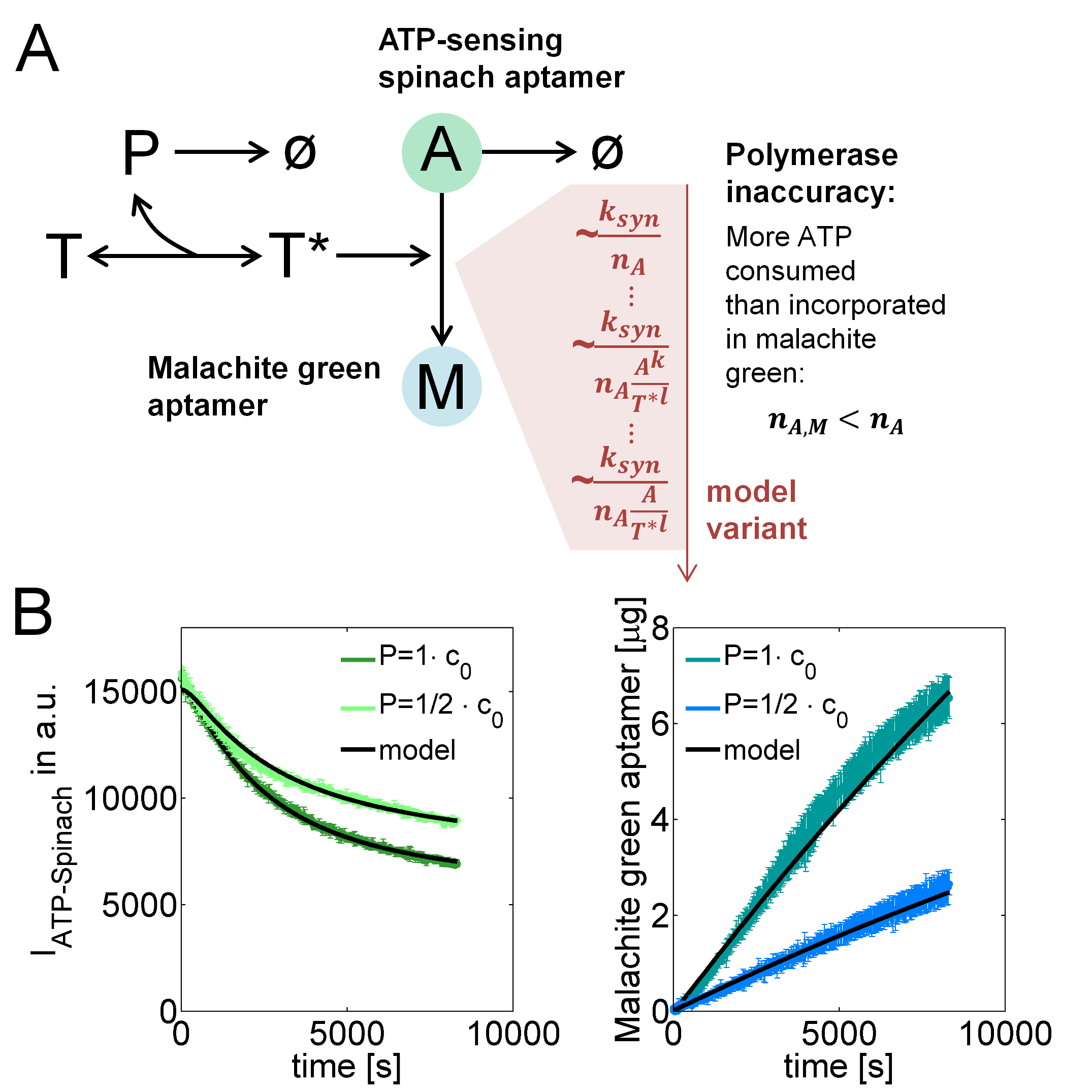
Figure 1. IVT model reactions and fits to experimental data. (A) Model reactions describing reversible assembly of templates $T$ and polymerase $P$ to active templates $T^*$ that incorporate ATP $A$ into malachite green RNA-aptamers $M$ but also into abortion products, leading to a higher number $n_A$ of consumed than ATP molecules $n_{A,M}$ incorporated in malachite green aptamers. (B) Model fits to data at two different polymerase concentrations.
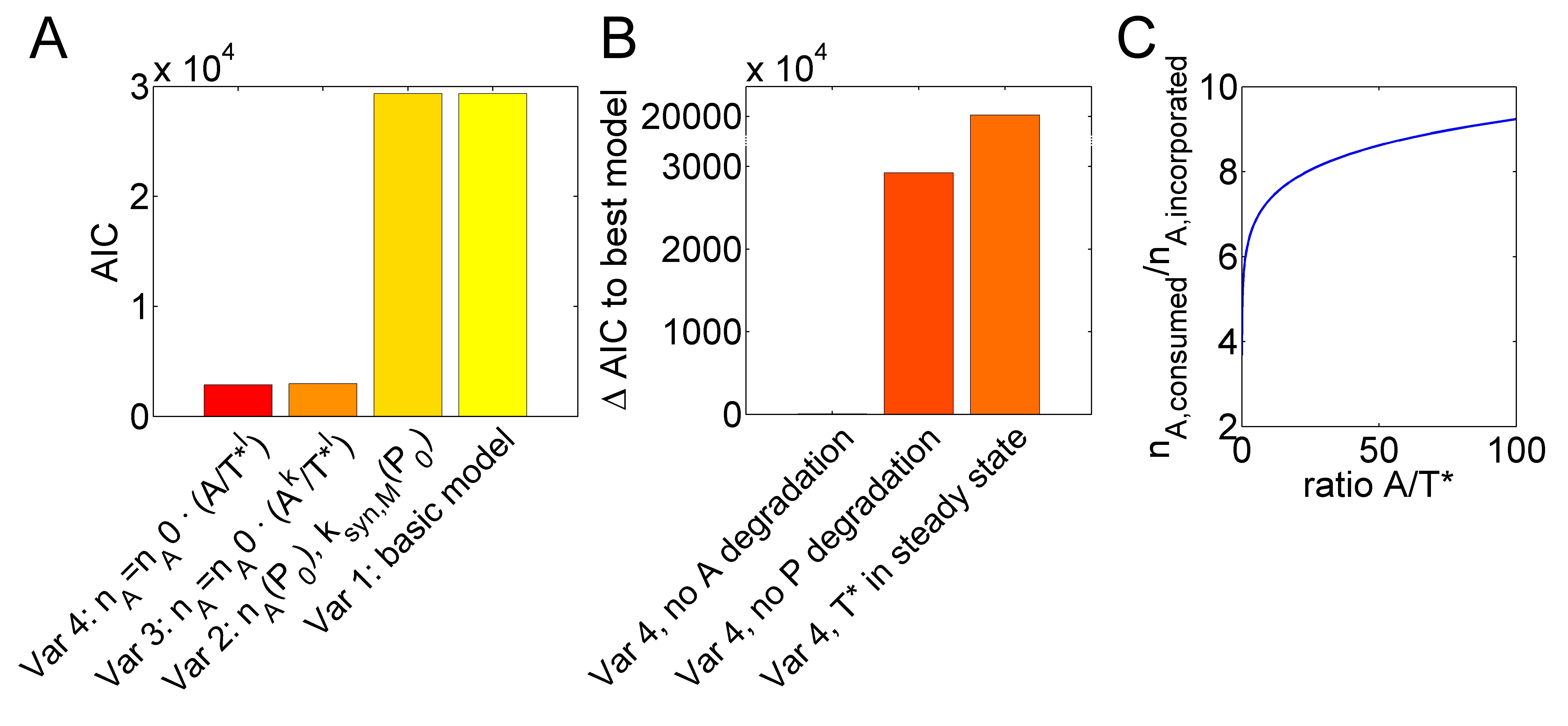
Figure 2. IVT inaccuracy depends on the ATP to active template ratio. (A) A basic model with constant numbers of $n_A$ and synthesis parameters $k_{syn,M}$, was extended to variants with $n_A$ and $k_{syn,M}$ depending on the polymerase concentration (variant 2), $A$- and $T^*$-dependent $n_A$ with exponents $k$ and $l$ (variant 3) or only an exponent for $T^*$ (variant 4). Fitting improvement is indicated by decreasing Akaike information criterion (AIC) values. (B) Reducing the optimal variant 4 by assuming a steady state for $T^*$, no degradation of $P$ or no degradation of $A$ disproved model fits. (C) Model variant 4 can explain increasing inefficiency (higher $n_A$) with decreasing $A/T^*$ ratios.
Table 3. Stepwise changes from the basic model to the optimal variant 4 and to simplifications of variant 4 to variants 4a to 4c
|
Model variant |
Subsequent modifications relative to basic model or previous variant |
Changes in fitting quality |
|
1 |
Michaelis-Menten instead of linear kinetics for active template |
no improvement |
|
2 |
Individual $k_{syn}$ and $n_A$ values for different polymerase concentrations |
improvement |
|
3 |
$n_A$ depends on function of $T^*$ and $A$ $n_A=n_{A,0} A^{k} /T^{*l}$ |
improvement, $k\approx0$
|
|
4, best model |
Setting $k=0$ |
improvement |
|
4a |
No degradation of P in variant 4 |
decrease |
|
4b |
No degradation of A in variant 4 |
decrease |
|
4c |
Binding of $P$ to $T$ in steady state in variant 4 |
decrease |
Table 4. Model equations for the basic model and variants 1 to 4c
|
Model species |
Variant |
Equation |
|
$P$ |
Basic model Variants 1 to 4, 4c |
$\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[T^*]-k_{deg,P}[P]$ |
|
Variant 4a |
$[P](t)=[P](t_{0})\exp\left(-k_{deg,P}t\right)$ |
|
|
Variant 4b |
$\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[T^*]$ |
|
|
$T$ |
Basic model Variants 1 to 4, 4b, 4c |
$\frac{d[T]}{dt}=-k_{on}[T][P]+k_{off}[T^*]$ |
|
Variant 4a |
$[T]=[T_{tot}]-[T^*]$ |
|
|
$T^*$ |
Basic model Variants 1 to 4, 4b, 4c |
$\frac{d[T^*]}{dt}=k_{on}[T][P]-k_{off}[T^*]$ |
|
Variant 4a |
$[T^*]=\frac{[T_{tot}][P]}{K_{d,P}}$ |
|
|
$A$ |
Basic model Variants 2 to 4, 4a, 4b |
$\frac{d[A]}{dt}=-k_{syn}[A][T^*]-k_{deg,A}[A]$ |
|
Variant 1 |
$\frac{d[A]}{dt}=-k_{syn}\frac{[A][T^*]}{K_{m,T}+[T^*]}-k_{deg,A}[A]$
|
|
|
Variant 4c |
$\frac{d[A]}{dt}=-k_{syn}[A][^*]$ |
|
|
$M$ |
Basic model, Variant 2 |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}[A][T^*]$ |
|
Variants 1 |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}\frac{[A][T^*]}{K_{m,T}+[T^*]}$ |
|
|
Variant 3 |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]^{k}}{[T^*]^{l}}}[A][T^*]=\frac{k_{syn}}{n_{A,0}}[A]^{1-k}[T^*]^{1+j}$ |
|
|
Variants 4, 4a, 4b, 4c |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]}{[T*]^{l}}}[A][T^*]=\frac{k_{syn}}{n_{A,0}}[T^*]^{1+j}$ |