Difference between revisions of "Team:Heidelberg/Modeling/rtsms"
| Line 33: | Line 33: | ||
<p class="basictext"> | <p class="basictext"> | ||
<p> | <p> | ||
| − | <img src="https://static.igem.org/mediawiki/2015/9/92/Modeling_fig4.png" style="width:2 | + | <img src="https://static.igem.org/mediawiki/2015/9/92/Modeling_fig4.png" style="width:2%;"> |
Table 3 shows iterative steps, which lead to the refined model version | Table 3 shows iterative steps, which lead to the refined model version | ||
</p> | </p> | ||
Revision as of 04:41, 2 October 2015

Studying determinants of polymerase efficiency based on an aptamer sensor
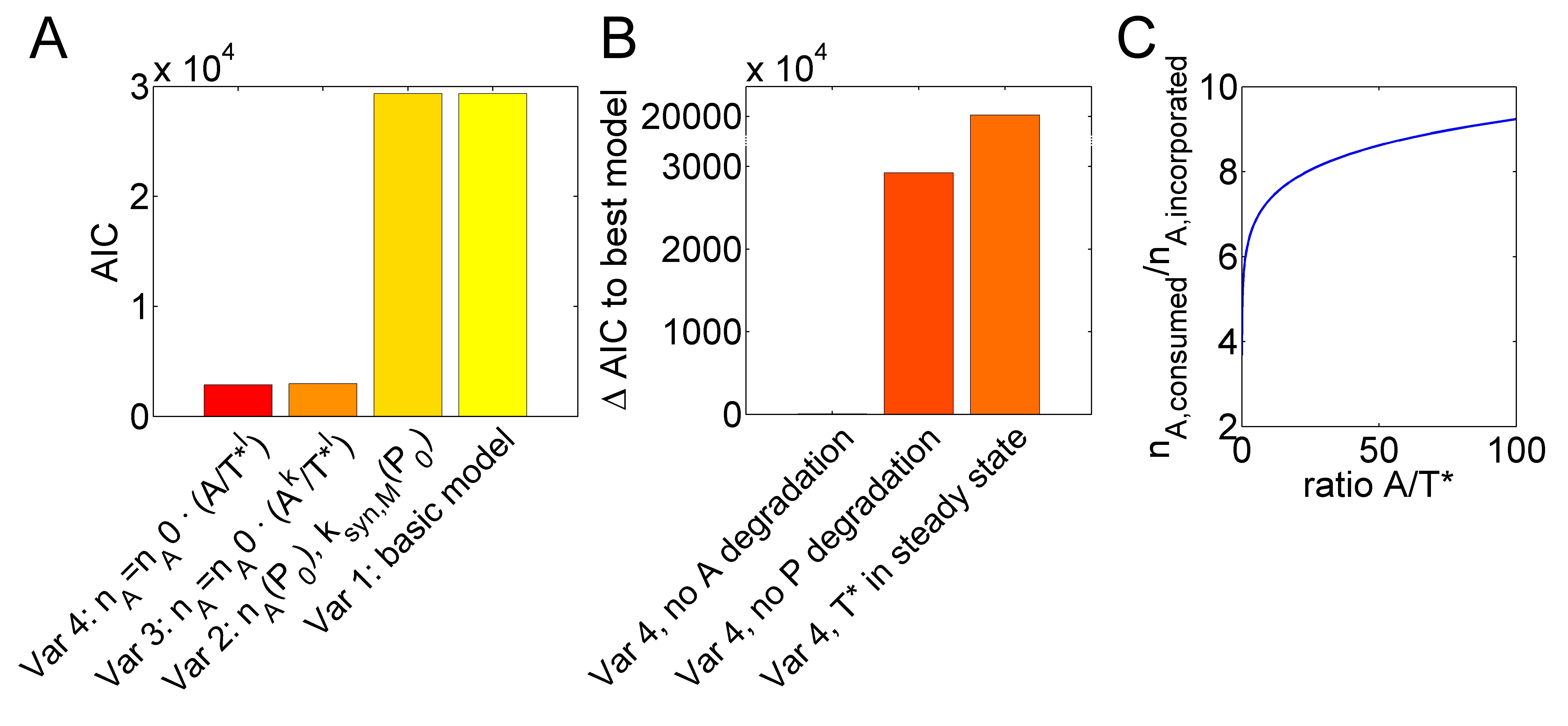 Table 3 shows iterative steps, which lead to the refined model version
Table 3 shows iterative steps, which lead to the refined model version
Table 3. Stepwise changes from the basic model to the optimal variant 4 and to simplifications of variant 4 to variants 4a to 4c
|
Model variant |
Subsequent modifications relative to basic model or previous variant |
Changes in fitting quality |
|
1 |
Michaelis-Menten instead of linear kinetics for active template |
no improvement |
|
2 |
Individual $k_{syn}$ and $n_A$ values for different polymerase concentrations |
improvement |
|
3 |
$n_A$ depends on function of $T_{act}$ and $A$ $n_A=n_{A,0} A^{k} /T_{act}^{l}$ |
improvement, $k\approx0$
|
|
4, best model |
Setting $k=0$ |
improvement |
|
4a |
No degradation of P in variant 4 |
decrease |
|
4b |
No degradation of A in variant 4 |
decrease |
|
4c |
Binding of $P$ to $T$ in steady state in variant 4 |
decrease |
Table 4. Model equations for the basic model and Variants 1 to 4c
|
Model species |
Variant |
Equation |
|
$P$ |
Basic model Variants 1 to 4, 4c |
$\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[T_{act}]-k_{deg,P}[P]$ |
|
Variant 4a |
$[P](t)=[P](t_{0})\exp\left(-k_{deg,P}t\right)$ |
|
|
Variant 4b |
$\frac{d[P]}{dt}=-k_{on}[T][P]+k_{off}[T_{act}]$ |
|
|
$T$ |
Basic model Variants 1 to 4, 4b, 4c |
$\frac{d[T]}{dt}=-k_{on}[T][P]+k_{off}[T_{act}]$ |
|
Variant 4a |
$[T]=[T_{tot}]-[T_{act}]$ |
|
|
$T_{act}$ |
Basic model Variants 1 to 4, 4b, 4c |
$\frac{d[T_{act}]}{dt}=k_{on}[T][P]-k_{off}[T_{act}]$ |
|
Variant 4a |
$[T_{act}]=\frac{[T_{tot}][P]}{K_{d,P}}$ |
|
|
$A$ |
Basic model Variants 2 to 4, 4a, 4b |
$\frac{d[A]}{dt}=-k_{syn}[A][T_{act}]-k_{deg,A}[A]$ |
|
Variant 1 |
$\frac{d[A]}{dt}=-k_{syn}\frac{[A][T_{act}]}{K_{m,T}+[T_{act}]}-k_{deg,A}[A]$
|
|
|
Variant 4c |
$\frac{d[A]}{dt}=-k_{syn}[A][T_{act}]$ |
|
|
$M$ |
Basic model, Variant 2 |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}[A][T_{act}]$ |
|
Variants 1 |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A}}\frac{[A][T_{act}]}{K_{m,T}+[T_{act}]}$ |
|
|
Variant 3 |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]^{k}}{[T_{act}]^{l}}}[A][T_{act}]=\frac{k_{syn}}{n_{A,0}}[A]^{1-k}[T_{act}]^{1+j}$ |
|
|
Variants 4, 4a, 4b, 4c |
$\frac{d[M]}{dt}=\frac{k_{syn}}{n_{A,0}\frac{[A]}{[T_{act}]^{l}}}[A][T_{act}]=\frac{k_{syn}}{n_{A,0}}[T_{act}]^{1+j}$ |
Table 5. Parameter estimates for switchable AptaBody candidates
|
parameter |
best fit |
lower CI |
upper CI |
% |
|
$k_{deg,A}$ |
0,00001055 |
0,000009087 |
0,00001157 |
23,5 |
|
$k_{deg,P}$ |
0,000307 |
0,0002983 |
0,0003017 |
1,1 |
|
$k_{on,P}$ |
0,002639 |
0,0007579 |
0,0007629 |
0,2 |
|
$k_{off,P}$ |
0,002742 |
0,003122 |
0,003196 |
2,7 |
|
l |
0,09085 |
0,07886 |
0,07999 |
1,2 |
|
$k_{syn,M,P=1c_0}$ |
0,06863 |
0,2054 |
0,2060 |
0,9 |
|
$n_{A_0,P=1c_0}$ |
126,67 |
126,4511826 |
127,8631277 |
3,2 |
|
$k_{syn,M,P=0.5c_0}$ |
0,02570 |
0,25683523 |
0,257400898 |
0,7 |
|
$n_{A_0,P=0.5c_0}$ |
425,8 |
421,0343254 |
428,7790799 |
5,8 |
|
$k_{syn,M,P=0.1c_0}$ |
0,5591 |
1,930027572 |
1,932774173 |
0,5 |
|
$n_{A_0,P=0.1c_0}$ |
293,5 |
159,0489132 |
Infinity |
Infinity |